3 Endogenous Macrodynamics in Algorithmic Recourse
Existing work on Counterfactual Explanations (CE) and Algorithmic Recourse (AR) has largely focused on single individuals in a static environment: given some estimated model, the goal is to find valid counterfactuals for an individual instance that fulfill various desiderata. The ability of such counterfactuals to handle dynamics like data and model drift remains a largely unexplored research challenge. There has also been surprisingly little work on the related question of how the actual implementation of recourse by one individual may affect other individuals. Through this work, we aim to close that gap. We first show that many of the existing methodologies can be collectively described by a generalized framework. We then argue that the existing framework does not account for a hidden external cost of recourse, that only reveals itself when studying the endogenous dynamics of recourse at the group level. Through simulation experiments involving various state-of-the-art counterfactual generators and several benchmark datasets, we generate large numbers of counterfactuals and study the resulting domain and model shifts. We find that the induced shifts are substantial enough to likely impede the applicability of Algorithmic Recourse in some situations. Fortunately, we find various strategies to mitigate these concerns. Our simulation framework for studying recourse dynamics is fast and open-sourced.
Algorithmic Recourse, Counterfactual Explanations, Explainable AI, Dynamic Systems
3.1 Introduction
Recent advances in Artificial Intelligence (AI) have propelled its adoption in scientific domains outside of Computer Science including Healthcare, Bioinformatics, Genetics and the Social Sciences. While this has in many cases brought benefits in terms of efficiency, state-of-the-art models like Deep Neural Networks (DNN) have also given rise to a new type of problem in the context of data-driven decision-making. They are essentially black boxes: so complex, opaque and underspecified in the data that it is often impossible to understand how they actually arrive at their decisions without auxiliary tools. Despite this shortcoming, black-box models have grown in popularity in recent years and have at times created undesirable societal outcomes (O’Neil 2016). The scientific community has tackled this issue from two different angles: while some have appealed for a strict focus on inherently interpretable models (Rudin 2019), others have investigated different ways to explain the behavior of black-box models. These two subdomains can be broadly referred to as interpretable AI and explainable AI (XAI), respectively.
Among the approaches to XAI that have recently grown in popularity are Counterfactual Explanations (CE). They explain how inputs into a model need to change for it to produce different outputs. Counterfactual Explanations that involve realistic and actionable changes can be used for the purpose of Algorithmic Recourse (AR) to help individuals who face adverse outcomes. An example relevant to the Social Sciences is consumer credit: in this context, AR can be used to guide individuals in improving their creditworthiness, should they have previously been denied access to credit based on an automated decision-making system. A meaningful recourse recommendation for a denied applicant could be: “If your net savings rate had been 10% of your monthly income instead of the actual 8%, your application would have been successful. See if you can temporarily cut down on consumption.” In the remainder of this paper, we will use both terminologies—recourse and counterfactual—interchangeably to refer to situations where counterfactuals are generated with the intent to provide individual recourse.
Existing work in this field has largely worked in a static setting: various approaches have been proposed to generate counterfactuals for a given individual that is subject to some pre-trained model. More recent work has compared different approaches within this static setting (Pawelczyk et al. 2021). In this work, we go one step further and ask ourselves: what happens if recourse is provided and implemented repeatedly? What types of dynamics are introduced, and how do different counterfactual generators compare in this context?
Research on Algorithmic Recourse has also so far typically addressed the issue from the perspective of a single individual. Arguably though, most real-world applications that warrant AR involve potentially large groups of individuals typically competing for scarce resources. Our work demonstrates that in such scenarios, choices made by or for a single individual are likely to affect the broader collective of individuals in ways that many current approaches to AR fail to account for. More specifically, we argue that a strict focus on minimizing the private costs to individuals may be too narrow an objective.
Figure 3.1 illustrates this idea for a binary problem involving a linear classifier and the counterfactual generator proposed by Wachter, Mittelstadt, and Russell (2017): the implementation of AR for a subset of samples from the negative class (orange) immediately leads to a visible domain shift in the (blue) target class (b), which in turn triggers a model shift (c). As this game of implementing AR and updating the classifier is repeated, the decision boundary moves away from training samples that were originally in the target class (d). We refer to these types of dynamics as endogenous because they are induced by the implementation of recourse itself. The term macrodynamics is borrowed from the economics literature and used to describe processes involving whole groups or societies.
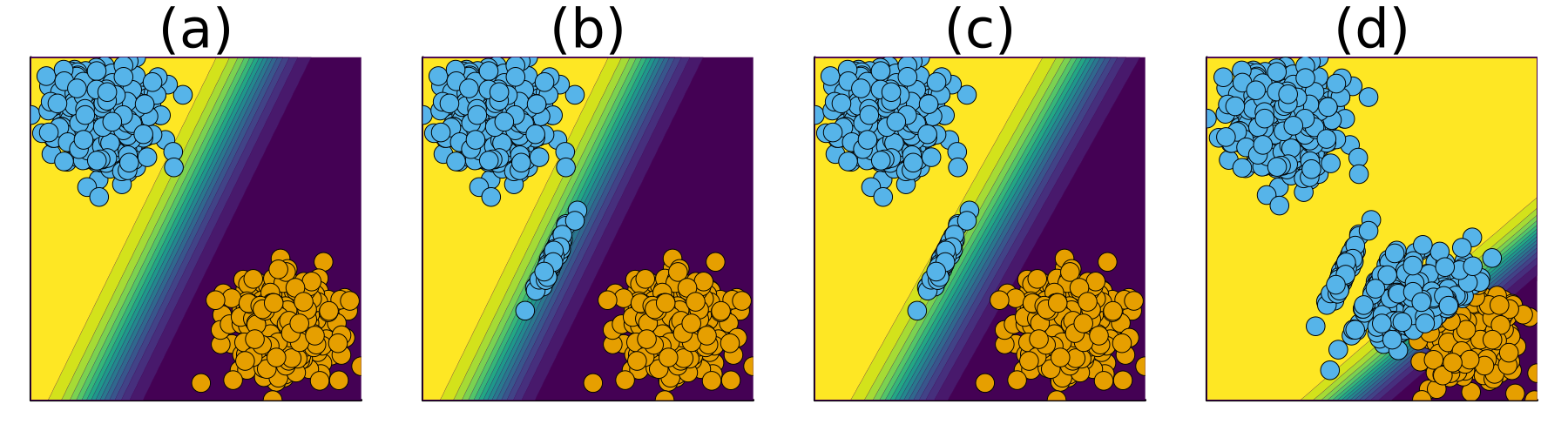
We think that these types of endogenous dynamics may be problematic and deserve our attention. From a purely technical perspective, we note the following: firstly, model shifts may inadvertently change classification outcomes for individuals who never received recourse. Secondly, we observe in Figure 3.1 that as the decision boundary moves in the direction of the non-target class, counterfactual paths become shorter. We think that in some practical applications, this can be expected to generate costs for involved stakeholders. To follow our argument, consider the following two examples:
Example 3.1 (Consumer Credit) Suppose Figure 3.1 relates to an automated decision-making system used by a retail bank to evaluate credit applicants with respect to their creditworthiness. Assume that the two features are meaningful in the sense that creditworthiness decreases in the bottom-right direction. Then we can think of the outcome in panel (d) as representing a situation where the bank supplies credit to more borrowers (blue), but these borrowers are on average less creditworthy and more of them can be expected to default on their loan. This represents a cost to the retail bank.
Example 3.2 (Student Admission) Suppose Figure 3.1 relates to an automated decision-making system used by a university in its student admission process. Assume that the two features are meaningful in the sense that the likelihood of students completing their degree decreases in the bottom-right direction. Then we can think of the outcome in panel (b) as representing a situation where more students are admitted to university (blue), but they are more likely to fail their degree than students that were admitted in previous years. The university admission committee catches on to this and suspends its efforts to offer Algorithmic Recourse. This represents an opportunity cost to future student applicants, that may have derived utility from being offered recourse.
Both examples are exaggerated simplifications of potential real-world scenarios, but they serve to illustrate the point that recourse for one single individual may exert negative externalities on other individuals.
To the best of our knowledge, this is the first work investigating endogenous macrodynamics in AR. Our contributions to the state of knowledge are as follows: firstly, we posit a compelling argument that calls for a novel perspective on Algorithmic Recourse extending our focus from single individuals to groups (Sections Section 3.2 and Section 3.3). Secondly, we introduce an experimental framework extending previous work by Altmeyer, Deursen, and Liem (2023) (Chapter 2), which enables us to study macrodynamics of Algorithmic Recourse through simulations that can be fully parallelized (Section Section 3.4). Thirdly, we use this framework to provide a first in-depth analysis of endogenous recourse dynamics induced by various popular counterfactual generators proposed in Wachter, Mittelstadt, and Russell (2017), Schut et al. (2021), Joshi et al. (2019), Mothilal, Sharma, and Tan (2020) and Antorán et al. (2020) (Section 3.5 and Section 3.6). Fourthly, given that we find a substantial impact of recourse, we propose and assess various mitigation strategies (Section Section 3.7). Finally, we discuss our findings in the broader context of the literature in Section Section 3.8, before pointing to some of the limitations of our work as well as avenues for future research in Section Section 3.9. Section Section 3.10 concludes.
3.3 Gradient-Based Recourse Revisited
In this section, we first set out a generalized framework for gradient-based counterfactual search that encapsulates the various Individual Recourse methods we have chosen to use in our experiments (Section Section 3.3.1). We then introduce the notion of a hidden external cost in Algorithmic Recourse and extend the existing framework to explicitly address this cost in the counterfactual search objective (Section Section 3.3.2).
3.3.1 From Individual Recourse …
We have chosen to focus on gradient-based counterfactual search for two reasons: firstly, they can be seen as direct descendants of our baseline method (Wachter); secondly, gradient-based search is particularly well-suited for differentiable black-box models like deep neural networks, which we focus on in this work. In particular, we include the following generators in our simulation experiments below: REVISE (Joshi et al. 2019), CLUE (Antorán et al. 2020), DiCE (Mothilal, Sharma, and Tan 2020) and a greedy approach that relies on probabilistic models (Schut et al. 2021). Our motivation for including these different generators in our analysis is that they all offer slightly different approaches to generating meaningful counterfactuals for differentiable black-box models. We hypothesize that generating more meaningful counterfactuals should mitigate the endogenous dynamics illustrated in Figure 3.1 in Section 3.1. This intuition stems from the underlying idea that more meaningful counterfactuals are generated by the same or at least a very similar data-generating process as the observed data. All else equal, counterfactuals that fulfil this basic requirement should be less prone to trigger shifts.
As we will see next, all of them can be described by the following generalized form of Equation 3.2:
\[ \begin{aligned} \mathbf{s}^\prime &= \arg \min_{\mathbf{s}^\prime \in \mathcal{S}} \left\{ {\text{yloss}(M(f(\mathbf{s}^\prime)),y^*)}+ \lambda {\text{cost}(f(\mathbf{s}^\prime)) } \right\} \end{aligned} \tag{3.3}\]
Here \(\mathbf{s}^\prime=\left\{s_k^\prime\right\}_K\) is a \(K\)-dimensional array of counterfactual states and \(f: \mathcal{S} \mapsto \mathcal{X}\) maps from the counterfactual state space to the feature space. In Wachter, the state space is the feature space: \(f\) is the identity function and the number of counterfactuals \(K\) is one. Both REVISE and CLUE search counterfactuals in some latent space \(\mathcal{S}\) instead of the feature space directly. The latent embedding is learned by a separate generative model that is tasked with learning the data-generating process (DGP) of \(X\). In this case, \(f\) in Equation 5.1 corresponds to the decoder part of the generative model, that is the function that maps back from the latent space to inputs. Provided the generative model is well-specified, traversing the latent embedding typically yields meaningful counterfactuals since they are implicitly generated by the (learned) DGP (Joshi et al. 2019).
CLUE distinguishes itself from REVISE and other counterfactual generators in that it aims to minimize the predictive uncertainty of the model in question, \(M\). To quantify predictive uncertainty, Antorán et al. (2020) rely on entropy estimates for probabilistic models. The greedy approach proposed by Schut et al. (2021), which we refer to as Greedy, also works with the subclass of models \(\tilde{\mathcal{M}}\subset\mathcal{M}\) that can produce predictive uncertainty estimates. The authors show that in this setting the cost function \(\text{cost}(\cdot)\) in Equation 5.1 is redundant and meaningful counterfactuals can be generated in a fast and efficient manner through a modified Jacobian-based Saliency Map Attack (JSMA). Schut et al. (2021) also show that by maximizing the predicted probability of \(x^\prime\) being assigned to target class \(y^*\), we also implicitly minimize predictive entropy (as in CLUE). In that sense, CLUE can be seen as equivalent to REVISE in the Bayesian context and we shall therefore refer to both approaches collectively as Latent Space generators3.
Finally, DiCE (Mothilal, Sharma, and Tan 2020) distinguishes itself from all other generators considered here in that it aims to generate a diverse set of \(K>1\) counterfactuals. Wachter, Mittelstadt, and Russell (2017) show that diverse outcomes can in principle be achieved simply by rerunning counterfactual search multiple times using stochastic gradient descent (or by randomly initializing the counterfactual)4. In Mothilal, Sharma, and Tan (2020) diversity is explicitly proxied via Determinantal Point Processes (DDP): the authors introduce DDP as a component of the cost function \(\text{cost}(\mathbf{s}^\prime)\) and thereby produce counterfactuals \(s_1, ..., s_K\) that look as different from each other as possible. The implementation of DiCE in our library of choice—CounterfactualExplanations.jl—uses that exact approach. It is worth noting that for \(k=1\), DiCE reduces to Wachter since the DDP is constant and therefore does not affect the objective function in Equation 5.1.
3.3.2 … towards Collective Recourse
All of the different approaches introduced above tackle the problem of Algorithmic Recourse from the perspective of one single individual5. To explicitly address the issue that Individual Recourse may affect the outcome and prospect of other individuals, we propose to extend Equation 5.1 as follows:
\[ \begin{aligned} \mathbf{s}^\prime &= \arg \min_{\mathbf{s}^\prime \in \mathcal{S}} \{ {\text{yloss}(M(f(\mathbf{s}^\prime)),y^*)} \\ &+ \lambda_1 {\text{cost}(f(\mathbf{s}^\prime))} + \lambda_2 {\text{extcost}(f(\mathbf{s}^\prime))} \} \end{aligned} \tag{3.4}\]
Here \(\text{cost}(f(\mathbf{s}^\prime))\) denotes the proxy for private costs faced by the individual as before and \(\lambda_1\) governs to what extent that private cost ought to be penalized. The newly introduced term \(\text{extcost}(f(\mathbf{s}^\prime))\) is meant to capture and address external costs incurred by the collective of individuals in response to changes in \(\mathbf{s}^\prime\). The underlying concept of private and external costs is borrowed from Economics and well-established in that field: when the decisions or actions by some individual market participant generate external costs, then the market is said to suffer from negative externalities and is considered inefficient (Pindyck and Rubinfeld 2014). We think that this concept describes the endogenous dynamics of algorithmic recourse observed here very well. As with Individual Recourse, the exact choice of \(\text{extcost}(\cdot)\) is not obvious, nor do we intend to provide a definitive answer in this work, if such even exists. That being said, we do propose a few potential mitigation strategies in Section 3.7.
3.4 Modelling Endogenous Macrodynamics in AR
In the following, we describe the framework we propose for modelling and analyzing endogenous macrodynamics in Algorithmic Recourse. We introduce this framework with the ambition to shed light on the following research questions:
Research Question 3.1 (Endogenous Shifts) Does the repeated implementation of recourse provided by state-of-the-art generators lead to shifts in the domain and model?
Research Question 3.2 (Costs) If so, are these dynamics substantial enough to be considered costly to stakeholders involved in real-world automated decision-making processes?
Research Question 3.3 (Heterogeneity) Do different counterfactual generators yield significantly different outcomes in this context? Furthermore, is there any heterogeneity concerning the chosen classifier and dataset?
Research Question 3.4 (Drivers) What are the drivers of endogenous dynamics in Algorithmic Recourse?
Below we first describe the basic simulations that were generated to produce the findings in this work and also constitute the core of AlgorithmicRecourseDynamics.jl—the Julia package we introduced earlier. The remainder of this section then introduces various evaluation metrics that can be used to benchmark different counterfactual generators with respect to how they perform in the dynamic setting.
3.4.1 Simulations
The dynamics illustrated in Figure 3.1 were generated through a simple experiment that aims to simulate the process of Algorithmic Recourse in practice. We begin in the static setting at time \(t=0\): firstly, we have some binary classifier \(M\) that was pre-trained on data \(\mathcal{D}=\mathcal{D}_0 \cup \mathcal{D}_1\), where \(\mathcal{D}_0\) and \(\mathcal{D}_1\) denote samples in the non-target and target class, respectively; secondly, we generate recourse for a random batch of \(B\) individuals in the non-target class (\(\mathcal{D}_0\)). Note that we focus our attention on classification problems since classification poses the most common use-case for recourse6.
In order to simulate the dynamic process, we suppose that the model \(M\) is retrained following the actual implementation of recourse in time \(t=0\). Following the update to the model, we assume that at time \(t=1\) recourse is generated for yet another random subset of individuals in the non-target class. This process is repeated for a number of time periods \(T\). To get a clean read on endogenous dynamics we keep the total population of samples closed: we allow existing samples to move from factual to counterfactual states but do not allow any entirely new samples to enter the population. The experimental setup is summarized in Algorithm 1.
Note that the operation in line 4 is an assignment, rather than a copy operation, so any updates to ‘batch’ will also affect \(\mathcal{D}\). The function \(\text{eval}(M,\mathcal{D})\) loosely denotes the computation of various evaluation metrics introduced below. In practice, these metrics can also be computed at regular intervals as opposed to every round.
Along with any other fixed parameters affecting the counterfactual search, the parameters \(T\) and \(B\) are assumed as given in Algorithm 1. Still, it is worth noting that the higher these values, the more factual instances undergo recourse throughout the entire experiment. Of course, this is likely to lead to more pronounced domain and model shifts by time \(T\). In our experiments, we choose the values such that the majority of the negative instances from the initial dataset receive recourse. As we compute evaluation metrics at regular intervals throughout the procedure, we can also verify the impact of recourse when it is implemented for a smaller number of individuals.
Algorithm 1 summarizes the proposed simulation experiment for a given dataset \(\mathcal{D}\), model \(M\) and generator \(G\), but naturally, we are interested in comparing simulation outcomes for different sources of data, models and generators. The framework we have built facilitates this, making use of multithreading in order to speed up computations. Holding the initial model and dataset constant, the experiments are run for all generators, since our primary concern is to benchmark different recourse methods. To ensure that each generator is faced with the same initial conditions in each round \(t\), the candidate batch of individuals from the non-target class is randomly drawn from the intersection of all non-target class individuals across all experiments \(\left\{\text{Experiment}(M,\mathcal{D},G)\right\}_{j=1}^J\) where \(J\) is the total number of generators.
3.4.2 Evaluation Metrics
We formulate two desiderata for the set of metrics used to measure domain and model shifts induced by recourse. First, the metrics should be applicable regardless of the dataset or classification technique so that they allow for the meaningful comparison of the generators in various scenarios. As knowledge of the underlying probability distribution is rarely available, the metrics should be empirical and non-parametric. This further ensures that we can also measure large datasets by sampling from the available data. Moreover, while our study was conducted in a two-class classification setting, our choice of metrics should remain applicable in future research on multi-class recourse problems. Second, the set of metrics should allow capturing various aspects of the previously mentioned magnitude, path, and pace of changes while remaining as small as possible.
3.4.2.1 Domain Shifts
To quantify the magnitude of domain shifts we rely on an unbiased estimate of the squared population Maximum Mean Discrepancy (MMD) given as:
\[ \begin{aligned} MMD({X}^\prime,\tilde{X}^\prime) &= \frac{1}{m(m-1)}\sum_{i=1}^m\sum_{j\neq i}^m k(x_i,x_j) \\ &+ \frac{1}{n(n-1)}\sum_{i=1}^n\sum_{j\neq i}^n k(\tilde{x}_i,\tilde{x}_j) \\ &- \frac{2}{mn}\sum_{i=1}^m\sum_{j=1}^n k(x_i,\tilde{x}_j) \end{aligned} \tag{3.5}\]
where \(X=\{x_1,...,x_m\}\), \(\tilde{X}=\{\tilde{x}_1,...,\tilde{x}_n\}\) represent independent and identically distributed samples drawn from probability distributions \(\mathcal{X}\) and \(\mathcal{\tilde{X}}\) respectively (Gretton et al. 2012). MMD is a measure of the distance between the kernel mean embeddings of \(\mathcal{X}\) and \(\mathcal{\tilde{X}}\) in a Reproducing Kernel Hilbert Space, \(\mathcal{H}\) (Berlinet and Thomas-Agnan 2011). An important consideration is the choice of the kernel function \(k(\cdot,\cdot)\). In our implementation, we make use of a Gaussian kernel with a constant length-scale parameter of \(0.5\). As the Gaussian kernel captures all moments of distributions \(\mathcal{X}\) and \(\mathcal{\tilde{X}}\), we have that \(MMD(X,\tilde{X})=0\) if and only if \(X=\tilde{X}\). Conversely, larger values \(MMD(X,\tilde{X})>0\) indicate that it is more likely that \(\mathcal{X}\) and \(\mathcal{\tilde{X}}\) are different distributions. In our context, large values, therefore, indicate that a domain shift indeed seems to have occurred.
To assess the statistical significance of the observed shifts under the null hypothesis that samples \(X\) and \(\tilde{X}\) were drawn from the same probability distribution, we follow Arcones and Gine (1992). To that end, we combine the two samples and generate a large number of permutations of \(X + \tilde{X}\). Then, we split the permuted data into two new samples \(X^\prime\) and \(\tilde{X}^\prime\) having the same size as the original samples. Under the null hypothesis, we should have that \(MMD(X^\prime,\tilde{X}^\prime)\) be approximately equal to \(MMD(X,\tilde{X})\). The corresponding \(p\)-value can then be calculated by counting how often these two quantities are not equal.
We calculate the MMD for both classes individually based on the ground truth labels, i.e. the labels that samples were assigned in time \(t=0\). Throughout our experiments, we generally do not expect the distribution of the negative class to change over time – application of recourse reduces the size of this class, but since individuals are sampled uniformly the distribution should remain unaffected. Conversely, unless a recourse generator can perfectly replicate the original probability distribution, we expect the MMD of the positive class to increase. Thus, when discussing MMD, we generally mean the shift in the distribution of the positive class.
3.4.2.2 Model Shifts
As our baseline for quantifying model shifts, we measure perturbations to the model parameters at each point in time \(t\) following Upadhyay, Joshi, and Lakkaraju (2021). We define \(\Delta=||\theta_{t+1}-\theta_{t}||^2\), that is the euclidean distance between the vectors of parameters before and after retraining the model \(M\). We shall refer to this baseline metric simply as Perturbations.
Furthermore, we extend the metric in Equation 5.8 to quantify model shifts. Specifically, we introduce Predicted Probability MMD (PP MMD): instead of applying Equation 5.8 to features directly, we apply it to the predicted probabilities assigned to a set of samples by the model \(M\). If the model shifts, the probabilities assigned to each sample will change; again, this metric will equal 0 only if the two classifiers are the same. We compute PP MMD in two ways: firstly, we compute it over samples drawn uniformly from the dataset, and, secondly, we compute it over points spanning a mesh grid over a subspace of the entire feature space. For the latter approach, we bound the subspace by the extrema of each feature. While this approach is theoretically more robust, unfortunately, it suffers from the curse of dimensionality, since it becomes increasingly difficult to select enough points to overcome noise as the dimension \(D\) grows.
As an alternative to PP MMD, we use a pseudo-distance for the Disagreement Coefficient (Disagreement). This metric was introduced in Hanneke (2007) and estimates \(p(M(x) \neq M^\prime(x))\), that is the probability that two classifiers disagree on the predicted outcome for a randomly chosen sample. Thus, it is not relevant whether the classification is correct according to the ground truth, but only whether the sample lies on the same side of the two respective decision boundaries. In our context, this metric quantifies the overlap between the initial model (trained before the application of AR) and the updated model. A Disagreement Coefficient unequal to zero is indicative of a model shift. The opposite is not true: even if the Disagreement Coefficient is equal to zero, a model shift may still have occurred. This is one reason why PP MMD is our preferred metric.
We further introduce Decisiveness as a metric that quantifies the likelihood that a model assigns a high probability to its classification of any given sample. We define the metric simply as \({\frac{1}{N}}\sum_{i=0}^N(\sigma(M(x)) - 0.5)^2\) where \(M(x)\) are predicted logits from a binary classifier and \(\sigma\) denotes the sigmoid function. This metric provides an unbiased estimate of the binary classifier’s tendency to produce high-confidence predictions in either one of the two classes. Although the exact values for this metric are not important for our study, they can be used to detect model shifts. If decisiveness changes over time, then this is indicative of the decision boundary moving towards either one of the two classes. A potential caveat of this metric in the context of our experiments is that it will to some degree get inflated simply through retraining the model.
Finally, we also take a look at the out-of-sample Performance of our models. To this end, we compute their F-score on a test sample that we leave untouched throughout the experiment.
3.5 Experiment Setup
This section presents the exact ingredients and parameter choices describing the simulation experiments we ran to produce the findings presented in the next section (Section 3.6). For convenience, we use Algorithm 1 as a template to guide us through this section. A few high-level details upfront: each experiment is run for a total of \(T=50\) rounds, where in each round we provide recourse to five per cent of all individuals in the non-target class, so \(B_t=0.05 * N_t^{\mathcal{D}_0}\). All classifiers and generative models are retrained for 10 epochs in each round \(t\) of the experiment. Rather than retraining models from scratch, we initialize all parameters at their previous levels (\(t-1\)) and backpropagate for 10 epochs using the new training data as inputs into the existing model. Evaluation metrics are computed and stored every 10 rounds. To account for noise, each individual experiment is repeated five times7.
3.5.1 \(M\)—Classifiers and Generative Models
For each dataset and generator, we look at three different types of classifiers, all of them built and trained using Flux.jl (Innes et al. 2018): firstly, a simple linear classifier—Logistic Regression—implemented as a single linear layer with sigmoid activation; secondly, a multilayer perceptron (MLP); and finally, a Deep Ensemble composed of five MLPs following Lakshminarayanan, Pritzel, and Blundell (2017) that serves as our only probabilistic classifier. We have chosen to work with deep ensembles both for their simplicity and effectiveness at modelling predictive uncertainty. They are also the model of choice in Schut et al. (2021). The network architectures are kept simple (top half of Table 3.1), since we are only marginally concerned with achieving good initial classifier performance.
The Latent Space generator relies on a separate generative model. Following the authors of both REVISE and CLUE we use Variational Autoencoders (VAE) for this purpose. As with the classifiers, we deliberately choose to work with fairly simple architectures (bottom half of Table 3.1). More expressive generative models generally also lead to more meaningful counterfactuals produced by Latent Space generators. But in our view, this should simply be considered as a vulnerability of counterfactual generators that rely on surrogate models to learn realistic representations of the underlying data.
3.5.2 \(\mathcal{D}\)—Data
We have chosen to work with both synthetic and real-world datasets. Using synthetic data allows us to impose distributional properties that may affect the resulting recourse dynamics. Following Upadhyay, Joshi, and Lakkaraju (2021), we generate synthetic data in \(\mathbb{R}^2\) to also allow for a visual interpretation of the results. Real-world data is used in order to assess if endogenous dynamics also occur in higher-dimensional settings.
3.5.2.1 Synthetic data
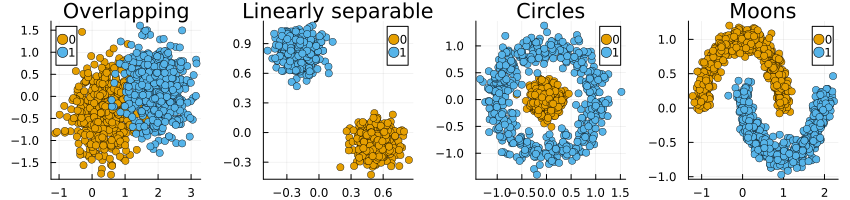
We use four synthetic binary classification datasets consisting of 1000 samples each: Overlapping, Linearly Separable, Circles and Moons (Figure 3.2).
Ex-ante we expect to see that by construction, Wachter will create a new cluster of counterfactual instances in the proximity of the initial decision boundary as we saw in Figure 3.1. Thus, the choice of a black-box model may have an impact on the counterfactual paths. For generators that use latent space search (REVISE (Joshi et al. 2019), CLUE (Antorán et al. 2020)) or rely on (and have access to) probabilistic models (CLUE (Antorán et al. 2020), Greedy (Schut et al. 2021)) we expect that counterfactuals will end up in regions of the target domain that are densely populated by training samples. Of course, this expectation hinges on how effective said probabilistic models are at capturing predictive uncertainty. Finally, we expect to see the counterfactuals generated by DiCE to be diversely spread around the feature space inside the target class8. In summary, we expect that the endogenous shifts induced by Wachter outsize those of all other generators since Wachter is not explicitly concerned with generating what we have defined as meaningful counterfactuals.
3.5.3 Real-world data
We use three different real-world datasets from the Finance and Economics domain, all of which are tabular and can be used for binary classification. Firstly, we use the Give Me Some Credit dataset which was open-sourced on Kaggle for the task to predict whether a borrower is likely to experience financial difficulties in the next two years (Kaggle 2011), originally consisting of 250,000 instances with 11 numerical attributes. Secondly, we use the UCI defaultCredit dataset (Yeh and Lien 2009), a benchmark dataset that can be used to train binary classifiers to predict the binary outcome variable of whether credit card clients default on their payment. In its raw form, it consists of 23 explanatory variables: 4 categorical features relating to demographic attributes and 19 continuous features largely relating to individuals’ payment histories and amount of credit outstanding. Both datasets have been used in the literature on AR before (see for example Pawelczyk et al. (2021), Joshi et al. (2019) and Ustun, Spangher, and Liu (2019)), presumably because they constitute real-world classification tasks involving individuals that compete for access to credit.
As a third dataset, we include the California Housing dataset derived from the 1990 U.S. census and sourced through scikit-learn (Pace and Barry 1997). It consists of 8 continuous features that can be used to predict the median house price for California districts. The continuous outcome variable is binarized as \(\tilde{y}=\mathbb{I}_{y>\text{median}(Y)}\) indicating whether the median house price of a given district is above the median of all districts. While we have not seen this dataset used in the previous literature on AR, others have used the Boston Housing dataset in a similar fashion (Schut et al. 2021). We initially also conducted experiments on that dataset, but eventually discarded it due to surrounding ethical concerns (Carlisle 2019).
Since the simulations involve generating counterfactuals for a significant proportion of the entire sample of individuals, we have randomly undersampled each dataset to yield balanced subsamples consisting of 5,000 individuals each. We have also standardized all continuous explanatory features since our chosen classifiers are sensitive to scale.
3.5.4 \(G\)—Generators
All generators introduced earlier are included in the experiments: Wachter (Wachter, Mittelstadt, and Russell 2017), REVISE (Joshi et al. 2019), CLUE (Antorán et al. 2020), DiCE (Mothilal, Sharma, and Tan 2020) and Greedy (Schut et al. 2021). In addition, we introduce two new generators in Section Section 3.7 that directly address the issue of endogenous domain and model shifts. We also test to what extent it may be beneficial to combine ideas underlying the various generators.
3.6 Experiments
Below, we first present our main experimental findings regarding these questions. We conclude this section with a brief recap providing answers to all of these questions.
3.6.1 Endogenous Macrodynamics
We start this section off with the key high-level observations. Across all datasets (synthetic and real), classifiers and counterfactual generators we observe either most or all of the following dynamics at varying degrees:
Statistically significant domain and model shifts as measured by MMD.
A deterioration in out-of-sample model performance as measured by the F-Score evaluated on a test sample. In many cases this drop in performance is substantial.
Significant perturbations to the model parameters as well as an increase in the model’s decisiveness.
Disagreement between the original and retrained model, in some cases large.
There is also some clear heterogeneity across the results:
The observed dynamics are generally of the highest magnitude for the linear classifier. Differences in results for the MLP and Deep Ensemble are mostly negligible.
The reduction in model performance appears to be most severe when classes are not perfectly separable or the initial model performance was weak, to begin with.
Except for the Greedy generator, all other generators generally perform somewhat better overall than the baseline (Wachter) as expected.
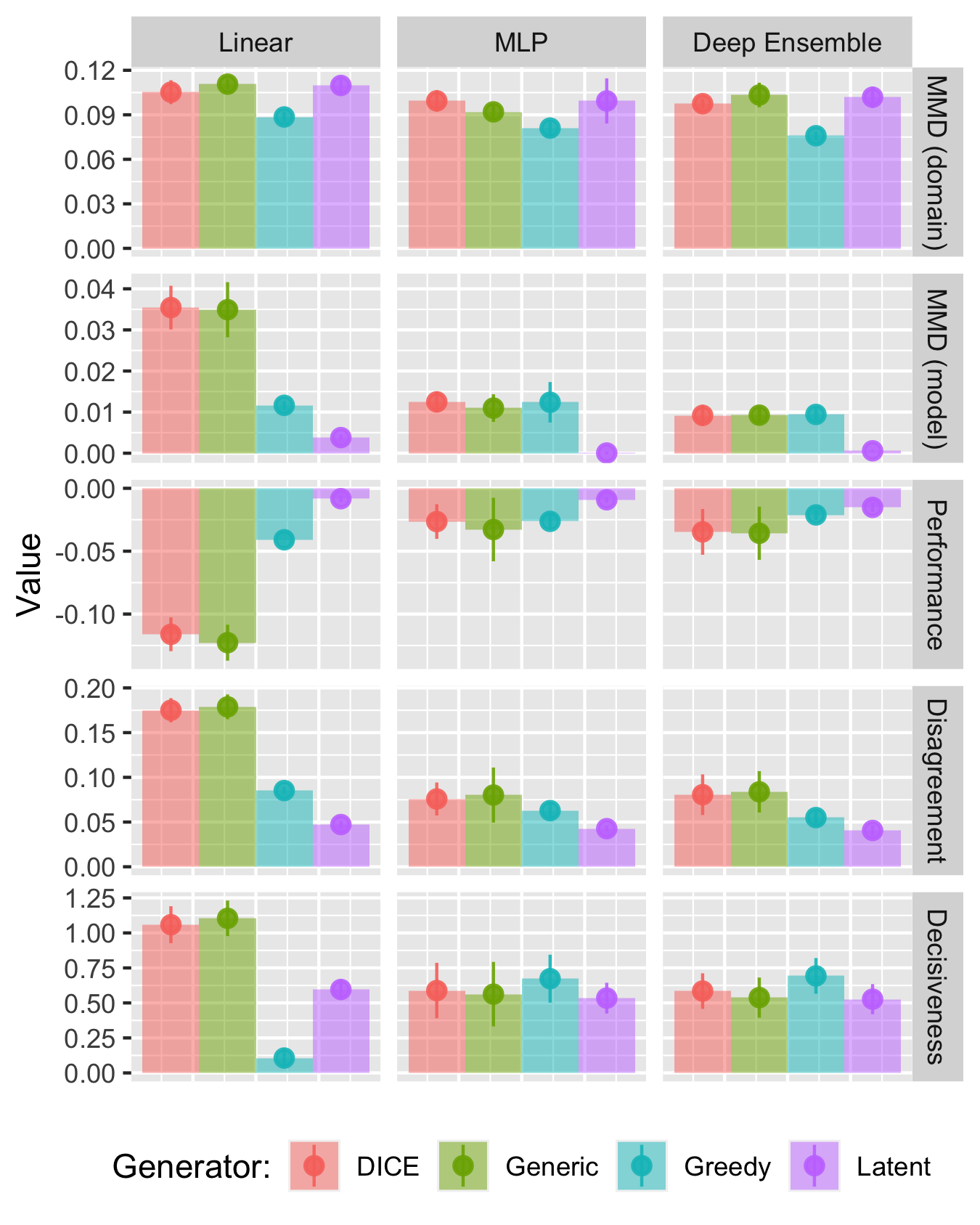
Focusing first on synthetic data, Figure 3.3 presents our findings for the dataset with overlapping classes. It shows the resulting values for some of our evaluation metrics at the end of the experiment, after all \(T=50\) rounds, along with error bars indicating the variation across folds.
The top row shows the estimated domain shifts. While it is difficult to interpret the exact magnitude of MMD, we can see that the values are different from zero and there is essentially no variation across our five folds. For the domain shifts, the Greedy generator induces the smallest shifts, possibly because it only ever affects one feature per iteration. In general, we have observed the opposite9.
The second row shows the estimated model shifts, where here we have used the grid approach explained earlier. As with the domain shifts, the observed values are clearly different from zero and variation across folds is once again small. In this case, the results for this particular dataset very much reflect the broader patterns we have observed: Latent Space (LS) generators induce the smallest shifts, while DiCE and Greedy are generally on par with generic search (Wachter)10.
The same broad pattern also emerges in the third row: we observe the smallest deterioration in model performance for LS generators with a reduction in the F-Score of at most 2 percentage points. For DiCE and Wachter, the reduction in performance is up to 5 percentage points for non-linear models and up to nearly 15 percentage points for the linear classifier11. Related to this, the third row indicates that the retrained classifiers disagree with their initial counterparts on the classification of up to nearly 20 per cent of the individuals12. We also note that the final classifiers are more decisive, although as we noted earlier this may to some extent just be a byproduct of retraining the model throughout the experiment.
Figure 3.3 also indicates that the estimated effects are strongest for the simplest linear classifier, a pattern that we have observed fairly consistently. Conversely, there is virtually no difference in outcomes between the deep ensemble and the MLP. It is possible that the deep ensembles simply fail to capture predictive uncertainty well and hence counterfactual generators like Greedy, which explicitly addresses this quantity, fail to work as expected.
The findings for the other synthetic datasets are broadly consistent with the observations above (see appendix). For the Moons data, the same broad patterns emerge, although in this case, the Greedy generator induces comparably strong shifts in some cases. For the Circles data, model shifts and performance deterioration are quantitatively much smaller than what we can observe in Figure 3.3 and in many cases insignificant. For the Linearly Separable data we also find substantial domain and model shifts13.
Finally, it is also worth noting that the observed dynamics and patterns are consistent throughout the experiment. That is to say that we start observing shifts already after just a few rounds and these tend to increase proportionately for the different generators over the course of the experiment.
Turning to the real-world data we will go through the findings presented in Figure 3.4, where each column corresponds to one of the three data sets. The results shown here are for the deep ensemble, which once again largely resemble those for the MLP. Starting from the top row, we find domain shifts of varying magnitudes that are in many cases statistically significant (see appendix for details). Latent Space search induces shifts that are orders of magnitude higher than for the other generators, which generally induce significant but small shifts.
Model shifts are shown in the middle row of Figure 3.4: the estimated PP MMD is statistically significant across the board and in some cases much larger than in others. We find no evidence that LS search helps to mitigate model shifts, as we did before for the synthetic data. Since these real-world datasets are arguably more complex than the synthetic data, the generative model can be expected to have a harder time learning the data-generating process and hence this increased difficulty appears to affect the performance of REVISE/CLUE.
The out-of-sample model performance also deteriorates across the board and substantially so: the largest average reduction in F-Scores of more than 10 percentage points is observed for the Credit Default dataset. For this dataset we achieved the lowest initial model performance, indicating once again that weaker classifiers may be more exposed to endogenous dynamics. As with the synthetic data, the estimates for logistic regression are qualitatively in line with the above, but quantitatively even more pronounced.

To recap, we answer our research questions: firstly, endogenous dynamics do emerge in our experiments (RQ 3.1) and we find them substantial enough to be considered costly (RQ 3.2); secondly, the choice of the counterfactual generator matters, with Latent Space search generally having a dampening effect (RQ 3.3). The observed dynamics, therefore, seem to be driven by a discrepancy between counterfactual outcomes that minimize costs to individuals and outcomes that comply with the data-generating process (RQ 3.4).
3.7 Mitigation Strategies and Experiments
Having established in the previous section that endogenous macrodynamics in AR are substantial enough to warrant our attention, in this section we ask ourselves:
Research Question 3.5 (Mitigation Strategies) What are potential mitigation strategies with respect to endogenous macrodynamics in AR?
We propose and test several simple mitigation strategies. All of them essentially boil down to one simple principle: to avoid domain and model shifts, the generated counterfactuals should comply as much as possible with the true data-generating process. This principle is really at the core of Latent Space (LS) generators, and hence it is not surprising that we have found these types of generators to perform comparably well in the previous section. But as we have mentioned earlier, generators that rely on separate generative models carry an additional computational burden and, perhaps more importantly, their performance hinges on the performance of said generative models. Fortunately, it turns out that we can use a number of other, much simpler strategies.
3.7.1 More Conservative Decision Thresholds
The most obvious and trivial mitigation strategy is to simply choose a higher decision threshold \(\gamma\). This threshold determines when a counterfactual should be considered valid. Under \(\gamma=0.5\), counterfactuals will end up near the decision boundary by construction. Since this is the region of maximal aleatoric uncertainty, the classifier is bound to be thrown off. By setting a more conservative threshold, we can avoid this issue to some extent. A drawback of this approach is that a classifier with high decisiveness may classify samples with high confidence even far away from the training data.
3.7.2 Classifier Preserving ROAR (ClaPROAR)
Another strategy draws inspiration from ROAR (Upadhyay, Joshi, and Lakkaraju 2021): to preserve the classifier, we propose to explicitly penalize the loss it incurs when evaluated on the counterfactual \(x^\prime\) at given parameter values. Recall that \(\text{extcost}(\cdot)\) denotes what we had defined as the external cost in Equation 3.4. Formally, we let
\[ \begin{aligned} \text{extcost}(f(\mathbf{s}^\prime)) = l(M(f(\mathbf{s}^\prime)),y^\prime) \end{aligned} \tag{3.6}\]
for each counterfactual \(k\) where \(l\) denotes the loss function used to train \(M\). This approach, which we refer to as ClaPROAR, is based on the intuition that (endogenous) model shifts will be triggered by counterfactuals that increase classifier loss. It is closely linked to the idea of choosing a higher decision threshold, but is likely better at avoiding the potential pitfalls associated with highly decisive classifiers. It also makes the private vs. external cost trade-off more explicit and hence manageable.
3.7.3 Gravitational Counterfactual Explanations
Yet another strategy extends Wachter as follows: instead of only penalizing the distance of the individuals’ counterfactual to its factual, we propose penalizing its distance to some sensible point in the target domain, for example, the subsample average \(\bar{x}^*=\text{mean}(x)\), \(x \in \mathcal{D}_1\):
\[ \begin{aligned} \text{extcost}(f(\mathbf{s}^\prime)) = \text{dist}(f(\mathbf{s}^\prime),\bar{x}^*) \end{aligned} \tag{3.7}\]
Once again we can put this in the context of Equation 3.4: the former penalty can be thought of here as the private cost incurred by the individual, while the latter reflects the external cost incurred by other individuals. Higher choices of \(\lambda_2\) relative to \(\lambda_1\) will lead counterfactuals to gravitate towards the specified point \(\bar{x}^*\) in the target domain. In the remainder of this paper, we will therefore refer to this approach as Gravitational generator, when we investigate its usefulness for mitigating endogenous macrodynamics14.
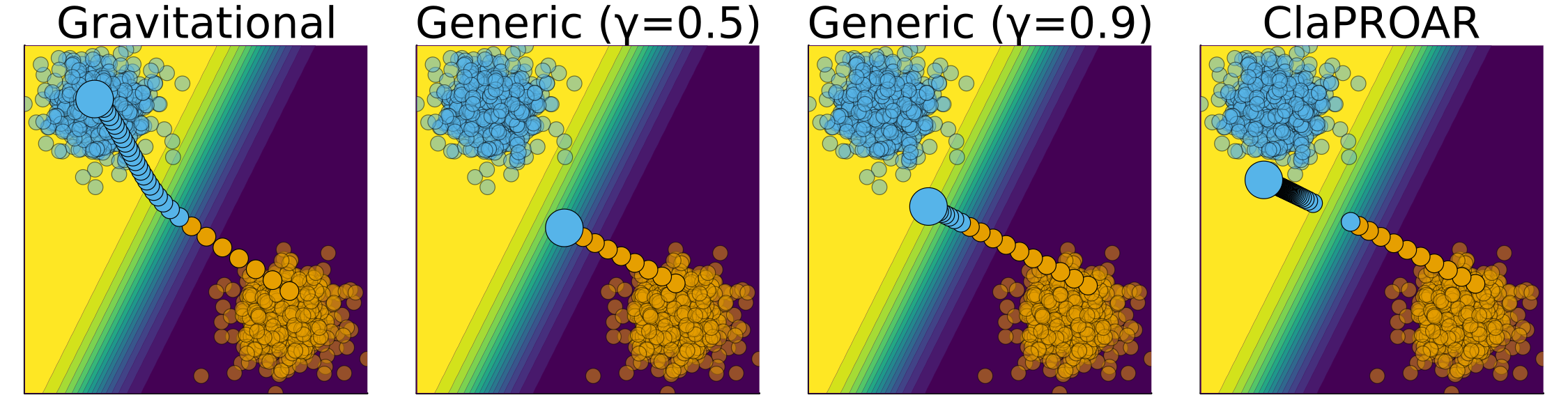
Figure 3.5 shows an illustrative example that demonstrates the differences in counterfactual outcomes when using the various mitigation strategies compared to the baseline approach, that is, Wachter with \(\gamma=0.5\): choosing a higher decision threshold pushes the counterfactual a little further into the target domain; this effect is even stronger for ClaPROAR; finally, using the Gravitational generator the counterfactual ends up all the way inside the target domain in the neighborhood of \(\bar{x}^*\)15. Linking these ideas back to Example Example 3.2, the mitigation strategies help ensure that the recommended recourse actions are substantial enough to truly lead to an increase in the probability that the admitted student eventually graduates.
Our findings indicate that all three mitigation strategies are at least at par with LS generators with respect to their effectiveness at mitigating domain and model shifts. Figure 3.6 presents a subset of the evaluation metrics for our synthetic data with overlapping classes. The top row in Figure 3.6 indicates that while domain shifts are of roughly the same magnitude for both Wachter and LS generators, our proposed strategies effectively mitigate these shifts. ClaPROAR appears to be particularly effective, which is positively surprising since it is designed to explicitly address model shifts, not domain shifts. As evident from the middle row in Figure 3.6 model shifts can also be reduced: for the deep ensemble LS search yields results that are at par with the mitigation strategies, while for both the simple MLP and logistic regression our simple strategies are more effective. The same overall pattern can be observed for out-of-sample model performance. Concerning the other synthetic datasets, for the Moons dataset, the emerging patterns are largely the same, but the estimated model shifts are insignificant as noted earlier; the same holds for the Circles dataset, but there is no significant reduction in model performance for our neural networks; in the case of linearly separable data, we find the Gravitational generator to be most effective at mitigating shifts.
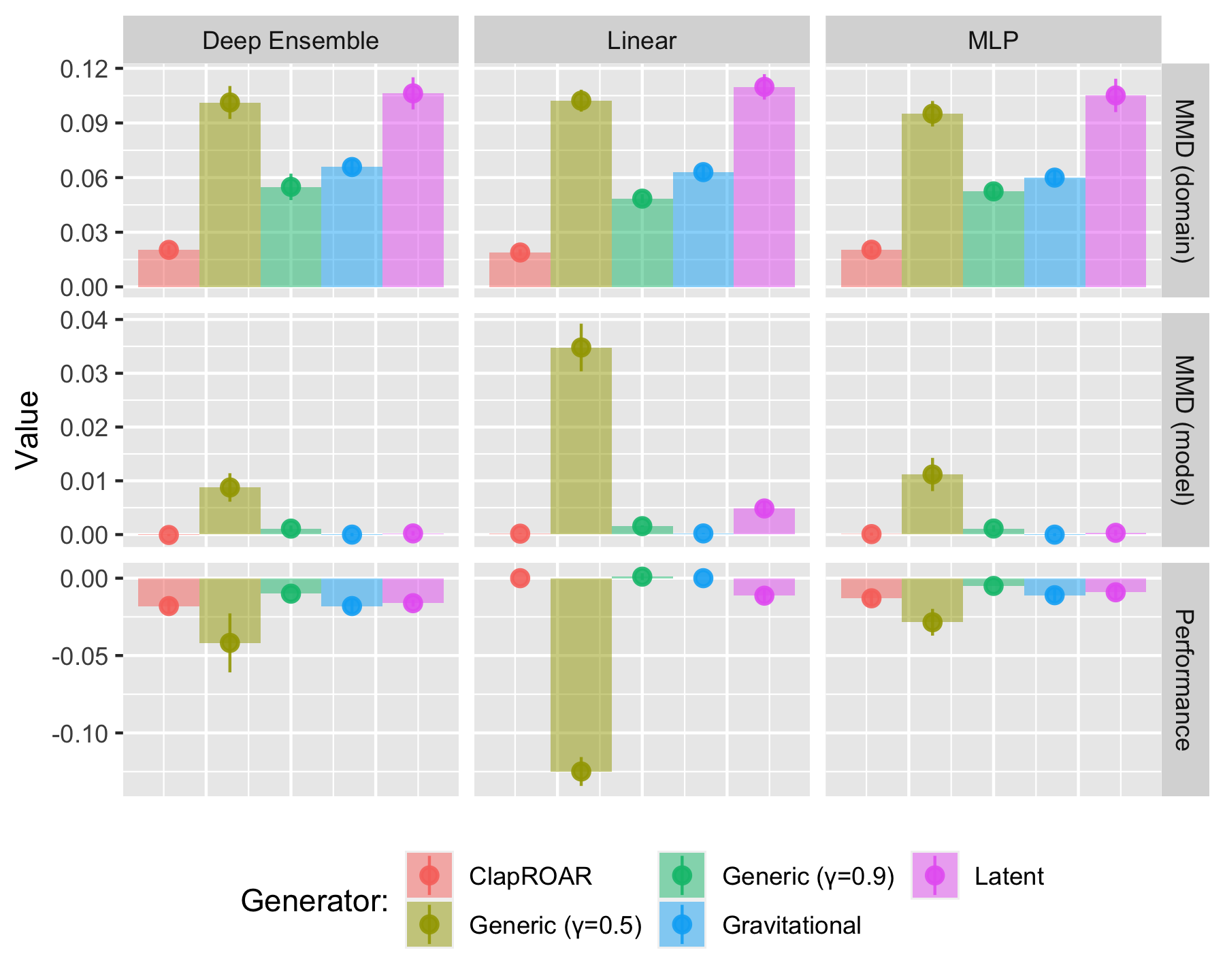
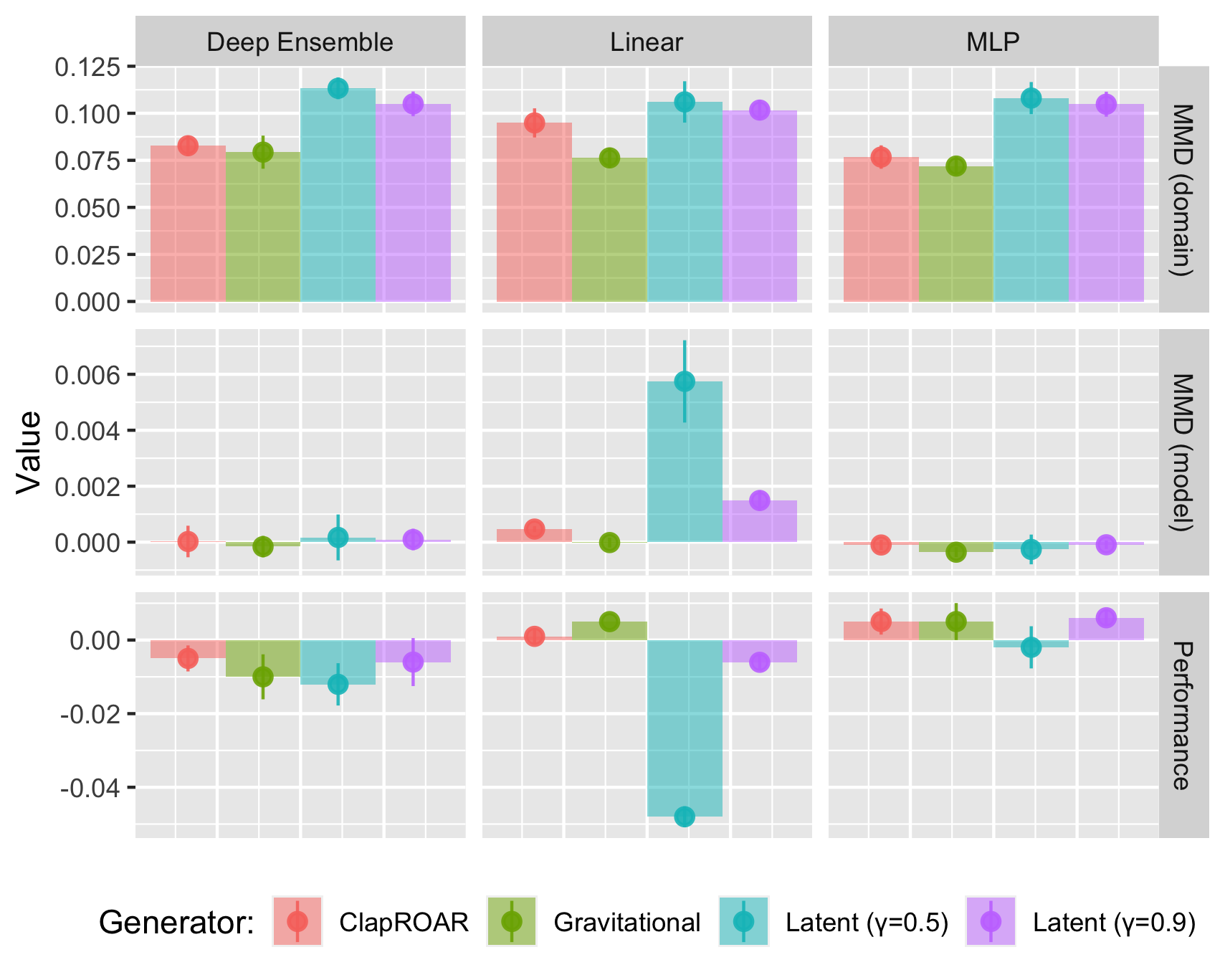
An interesting finding is also that the proposed strategies have a complementary effect when used in combination with LS generators. In experiments we conducted on the synthetic data, the benefits of LS generators were exacerbated further when using a more conservative threshold or combining it with the penalties underlying Gravitational and ClaPROAR. In Figure 3.7 the conventional LS generator with \(\gamma=0.5\) serves as our baseline. Evidently, being more conservative or using one of our proposed penalties decreases the estimated domain and model shifts, in some cases beyond significance.
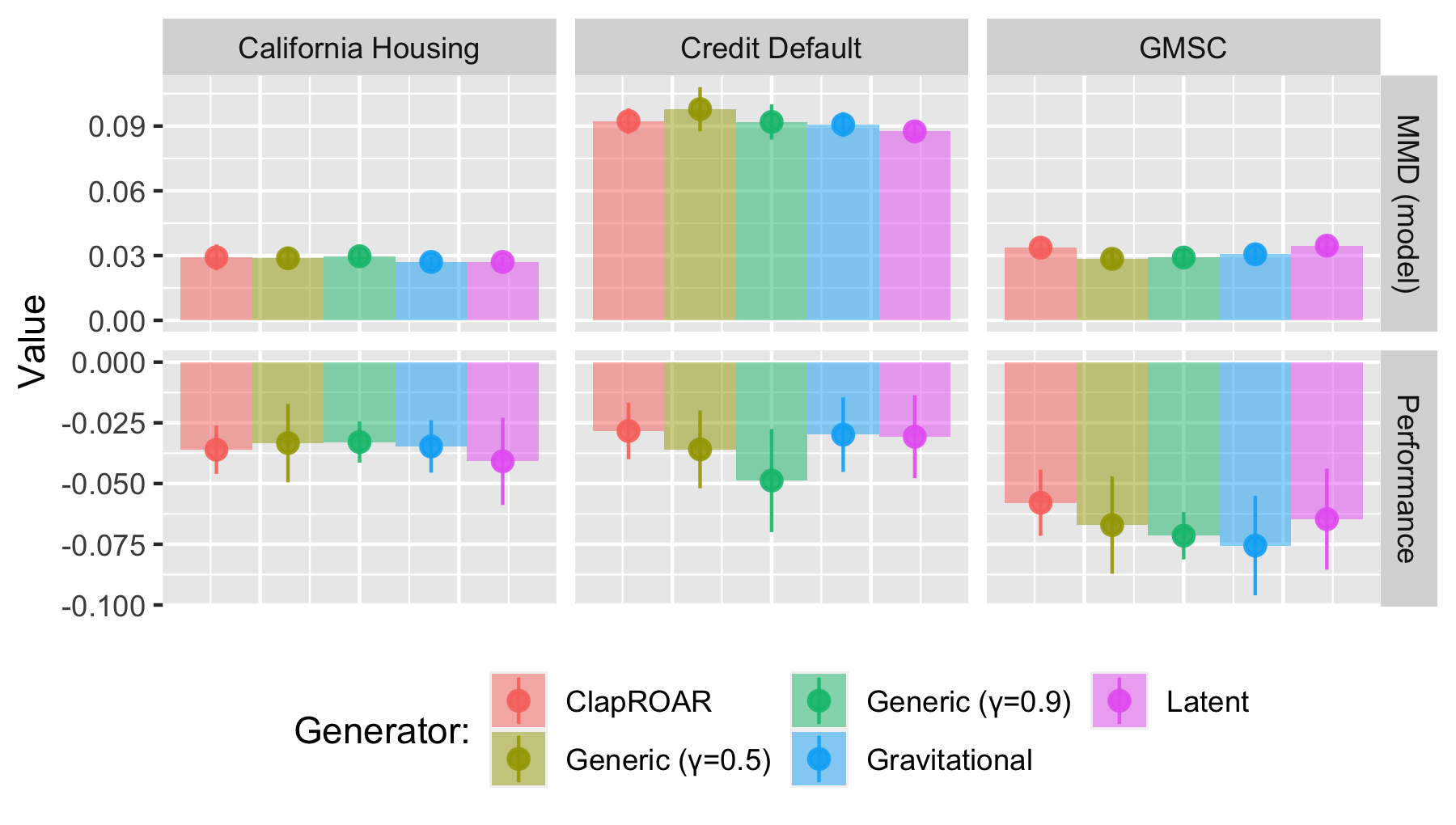
Finally, Figure 3.8 shows the results for our real-world data. We note that for both the California Housing and GMSC data, ClaPROAR does have an attenuating effect on model performance deterioration16. Overall, the results are less significant, possibly because a somewhat smaller share of individuals from the non-target group received recourse than in the synthetic case17.
3.8 Discussion
Our results in Section Section 3.6 indicate that state-of-the-art approaches to Algorithmic Recourse induce substantial domain and model shift if implemented at scale in practice. These induced shifts can and should be considered as an (expected) external cost of individual recourse. While they do not affect the individual directly as long as we look at the individual in isolation, they can be seen to affect the broader group of stakeholders in automated data-driven decision-making. We have seen, for example, that out-of-sample model performance generally deteriorates in our simulation experiments. In practice, this can be seen as a cost to model owners, that is the group of stakeholders using the model as a decision-making tool. As we have set out in Example Example 3.2 of our introduction, these model owners may be unwilling to carry that cost, and hence can be expected to stop offering recourse to individuals altogether. This in turn is costly to those individuals that would otherwise derive utility from being offered recourse.
So, where does this leave us? We would argue that the expected external costs of individual recourse should be shared by all stakeholders. The most straightforward way to achieve this is to introduce a penalty for external costs in the counterfactual search objective function, as we have set out in Equation 3.4. This will on average lead to more costly counterfactual outcomes, but may help to avoid extreme scenarios, in which minimal-cost recourse is reserved to a tiny minority of individuals. We have shown various types of shift-mitigating strategies that can be used to this end. Since all of these strategies can be seen simply as a specific adaption of Equation 3.4, they can be applied to any of the various counterfactual generators studied here.
3.9 Limitations and Future Work
While we believe that this work constitutes a valuable starting point for addressing existing issues in Algorithmic Recourse from a fresh perspective, we are aware of several of its limitations. In the following, we highlight some of these and point to avenues for future research.
3.9.1 Private vs. External Costs
Perhaps the most crucial shortcoming of our work is that we merely point out that there exists a trade-off between private costs to the individual and external costs to the collective of stakeholders. We fall short of providing any definitive answers as to how that trade-off may be resolved in practice. The mitigation strategies we have proposed here provide a good starting point, but they are ad-hoc extensions of the existing AR framework. An interesting idea to explore in future work could be the potential for Pareto optimal Algorithmic Recourse, that is, a collective recourse outcome in which no single individual can be made better off, without making at least one other individual worse off. This type of work would be interdisciplinary and could help to formalize some of the concepts presented in this work.
3.9.2 Experimental Setup
The experimental setup proposed here is designed to mimic a real-world recourse process in a simple fashion. In practice, models are updated regularly (Upadhyay, Joshi, and Lakkaraju 2021). We also find it plausible to assume that the implementation of recourse happens periodically for different individuals, rather than all at once at time \(t=0\). That being said, our experimental design is a vast over-simplification of potential real-world scenarios. In practice, any endogenous shifts that may occur can be expected to be entangled with exogenous shifts of the nature investigated in Upadhyay, Joshi, and Lakkaraju (2021). We also make implicit assumptions about the utility functions of the involved agents that may well be too simple: individuals seeking recourse are assumed to always implement the proposed Counterfactual Explanations; conversely, the agent in charge of the model \(M\) is assumed to always treat individuals that have implemented valid recourse as if they were truly now in the target class.
3.9.3 Causal Modelling
In this work, we have focused on popular counterfactual generators that do not incorporate any causal knowledge. The generated perturbations therefore may involve changes to variables that affect the outcome predicted by the black-box model, but not the true outcome. The implementation of such changes is typically described as gaming (Miller, Milli, and Hardt 2020), although they need not be driven by adversarial intentions: in Example Example 3.2, student applicants may dutifully focus on acquiring credentials that help them to be admitted to university, but ultimately not to improve their chances of success at completing their degree (Barocas, Hardt, and Narayanan 2022). Preventing such actions may help to avoid the dynamics we have pointed to in this work. Future work would likely benefit from including recent approaches to AR that incorporate causal knowledge such as Karimi, Schölkopf, and Valera (2021).
3.9.4 Classifiers
For reasons stated earlier, we have limited our analysis to differentiable linear and non-linear classifiers, in particular logistic regression and deep neural networks. While these sorts of classifiers have also typically been analyzed in the existing literature on Counterfactual Explanations and Algorithmic Recourse, they represent only a subset of popular machine learning models employed in practice. Despite the success and popularity of deep learning in the context of high-dimensional data such as image, audio and video, empirical evidence suggests that other models such as boosted decision trees may have an edge when it comes to lower-dimensional tabular datasets, such as the ones considered here (Borisov et al. 2022; Grinsztajn, Oyallon, and Varoquaux 2022).
3.9.5 Data
Largely in line with the existing literature on Algorithmic Recourse, we have limited our analysis of real-world data to three commonly used benchmark datasets that involve binary prediction tasks. Future work may benefit from including novel datasets or extending the analysis to multi-class or regression problems, the latter arguably representing the most common objective in Finance and Economics.
3.10 Concluding Remarks
This work has revisited and extended some of the most general and defining concepts underlying the literature on Counterfactual Explanations and, in particular, Algorithmic Recourse. We demonstrate that long-held beliefs as to what defines optimality in AR, may not always be suitable. Specifically, we run experiments that simulate the application of recourse in practice using various state-of-the-art counterfactual generators and find that all of them induce substantial domain and model shifts. We argue that these shifts should be considered as an expected external cost of individual recourse and call for a paradigm shift from individual to collective recourse in these types of situations. By proposing an adapted counterfactual search objective that incorporates this cost, we make that paradigm shift explicit. We show that this modified objective lends itself to mitigation strategies that can be used to effectively decrease the magnitude of induced domain and model shifts. Through our work, we hope to inspire future research on this important topic. To this end we have open-sourced all of our code along with a Julia package: AlgorithmicRecourseDynamics.jl. Future researchers should find it easy to replicate, modify and extend the simulation experiments presented here and apply them to their own custom counterfactual generators.
3.11 Acknowledgements
Some of the members of TU Delft were partially funded by ICAI AI for Fintech Research, an ING — TU Delft collaboration.
Equivalently, others have referred to this quantity as complexity or simply distance.↩︎
The code has been released as a package: https://github.com/pat-alt/AlgorithmicRecourseDynamics.jl.↩︎
In fact, there are several other recently proposed approaches to counterfactual search that also broadly fall in this same category. They largely differ with respect to the chosen generative model: for example, the generator proposed by Dombrowski, Gerken, and Kessel (2021) relies on normalizing flows.↩︎
Note that Equation 5.1 naturally lends itself to that idea: setting \(K\) to some value greater than one and using the Wachter objective essentially boils down to computing multiple counterfactuals in parallel. Here, \(yloss(\cdot)\) is first broadcasted over elements of \(\mathbf{s}^\prime\) and then aggregated. This is exactly how counterfactual search is implemented in
CounterfactualExplanations.jl.↩︎DiCE recognizes that different individuals may have different objective functions, but it does not address the interdependencies between different individuals.↩︎
To keep notation simple, we have also restricted ourselves to binary classification here, but
AlgorithmicRecourseDynamics.jlcan also be used for multi-class problems.↩︎In the current implementation, we use the same train-test split each time to only account for stochasticity associated with randomly selecting individuals for recourse. An interesting alternative may be to also perform data splitting each time, thereby adding a layer of randomness.↩︎
As we mentioned earlier, the diversity constraint used by DiCE is only effective when at least two counterfactuals are being generated. We have therefore decided to always generate 5 counterfactuals for each generator and randomly pick one of them.↩︎
For the Linearly Separable data, Greedy induces much stronger shifts than other generators. For the Moons dataset, this also holds for non-linear models.↩︎
In the original article, we mistakenly stated that Greedy generally introduces the most substantial shifts. What we should have stated instead is that the results for Greedy exert the highest levels of volatility across datasets and metrics, where in some cases Greedy produces the worst results out of all generators, while in other cases it induces the smalles shifts.↩︎
We have provided some more detail here than in the original article.↩︎
The original article incorrectly stated “nearly 25 percent”.↩︎
In the original article we mistakenly stated that for the linearly separable data we observe “almost no reduction in model performance”, which is only true for the non-linear models.↩︎
Note that despite the naming conventions, our goal here is not to provide yet more counterfactual generators. Rather than looking at them as isolated entities, we believe and demonstrate that different approaches can be effectively combined.↩︎
In order for the Gravitational generator and ClaPROAR to work as expected, one needs to ensure that counterfactual search continues, independent of the threshold probability \(\gamma\).↩︎
Estimated domain shifts (not shown) were largely insubstantial, as in Figure 3.4 in the previous section.↩︎
In earlier experiments we moved a larger share of individuals and the results more clearly favoured our mitigation strategies.↩︎